
 �ھ��ͷ�
�ھ��ͷ�
 ��I(y��)��
��I(y��)��


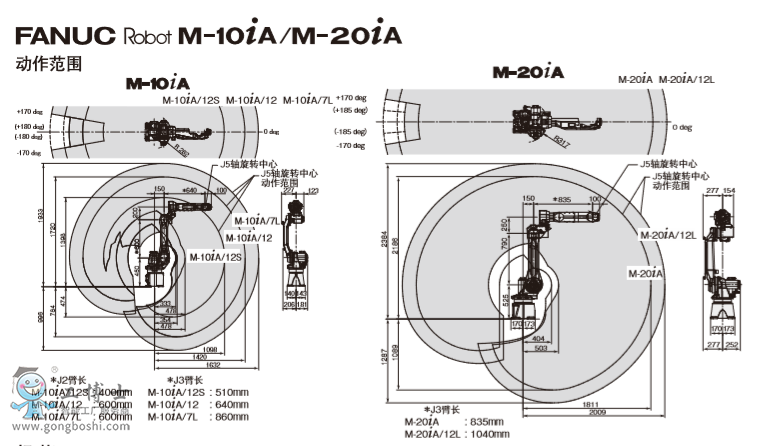
FANUC Robot M-10iA����|��(n��i)��ʽС�Ͱ��\�C(j��)������
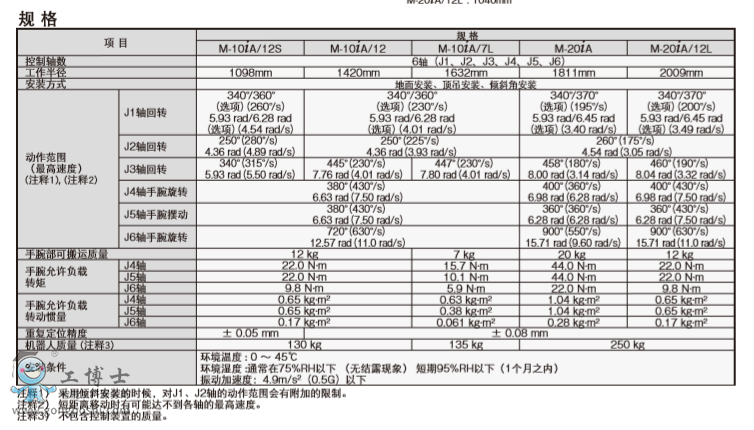
1.���Ը���(j��)��ͬ����; �������C(j��)�����M(j��n)���x����
M-10iA:��(bi��o)��(zh��n)�����̱��ͣ�12S�����L���ͣ�7L��
M-20iA:��(bi��o)��(zh��n)�����L���ͣ�12L��
2.ͨ�^���ø߄��Ե��ֱۺ�*���M(j��n)���ŷ����g(sh��)������˼Ӝp�����ܣ��s���˰��\�r�g���Ķ����F(xi��n)�˸����a(ch��n)����
3.�����S�����˪��ص��(q��)�әC(j��)��(g��u)���Ķ����F(xi��n)����l����|��(n��i)��ʽ������
4.�C(j��)��������������|���H���b�d�ھS�o(h��)�������õĆ�(c��)�ұ�����߀�����x����|�侀����ܛ��(d��o)�ܣ��x헣���
5.��錍�F(xi��n)�˙C(j��)��������������|λ�õķ�(w��n)���ԣ����Կ���ʹ��ROBOGUIDE���x헣��M(j��n)��Ó�C(j��)ʾ�����Ķ���������pʾ�̕r�g��
6.ͨ�^��iRVision(��(n��i)��ҕ�X���ܣ������X�������M(j��n)������ʹ��������ʹ�ø��N*�µ����ܻ�������
�˽����l(f��)�ǿƙC(j��)�����YӍ��http://www.fanuc-online.gongboshi.com/
�˽����l(f��)�ǿƙC(j��)�����YӍ��http://www.fanuc-online.gongboshi.com/



�j(lu��)����")


�j(lu��)110")